Savage Solder: Staying on the pavement part 2
Previously, I looked at how Savage Solder, our robomagellan entry, uses online replanning to avoid nearby cones. This time, I’ll cover the terrain oracle and how it integrates into the path planner.
For our simulation environment, we currently rely on digital elevation maps from the city of Cambridge along with aerial imagery of the environment. The simulator places the car in that fake world, and pretends to be each of the sensors that the car has. For Savage Solder, that is the IMU, the GPS, and the video camera.
In this first stage of staying on the pavement, we added an additional “oracle” sensor which has roughly the same field of view as the camera, but instead of reporting images, reports how fast the car can go at any point visible in the frame. The simulator gets this information from a hand-annotated map of the test area, where each pixel value corresponds to the maximum allowed speed. For example, below is downsampled aerial imagery of Danehy park in Cambridge, along with the hand annotated maximum speed map.

The locally referenced terrain data is fed into the online replanner. Currently, the maximum speed is just used as a penalty function, so that the car prefers to driver over terrain labeled with higher speeds. A sample online replanner output is shown below. Here, darker shades of red imply a higher maximum speed, and the black line is where the global GPS waypoints are in the current local reference frame. You can see the planned trajectory follow the red path despite it being offset some distance from the global trajectory. In practice, this will happen all the time, if nothing else because the GPS receiver on Savage Solder is comparatively low accuracy and often drifts by 3 or 4 meters in any direction.
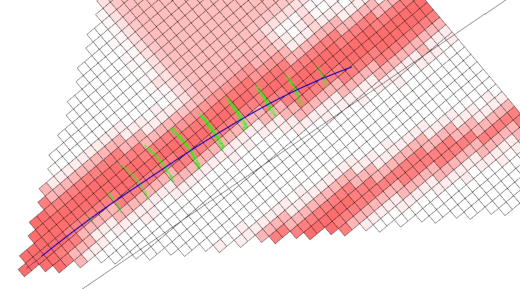
Online replanning on a sidewalk
As a caveat, the implementation now actually still drives at the speed programmed in by the global waypoints regardless of what the local maximum speeds are. The local sensor just modifies where it drives. Fixing that up is the immediate next step.
We hope this approach to also be useful for events like the Sparkfun AVC, where the traversable path is of the same size or narrower than the GPS accuracy.