Map Data for Sparkfun AVC 2013
Along with many others, we’re hoping to enter our car into the Sparkfun AVC 2013 this year! In support of our effort, I put together some datasets and 3D assets that might be useful to other participating teams, especially if they do any work in simulation.
Georeferenced Data
First, I used the most recent measurements from April 9th on the AVC website to create a kml file showing where each of the obstacles is, along with the course boundaries. I’ve included a snapshot from Google Earth below to show what it contains.
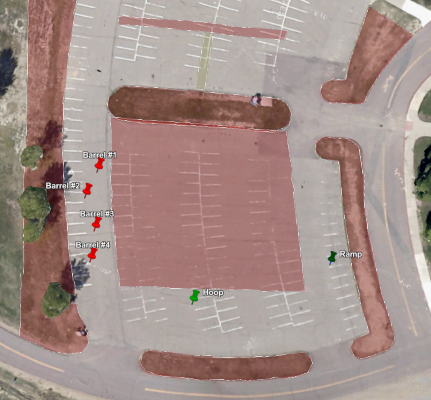
Sparkfun AVC 2013 Course Layout
Next, I extracted some freely available USGS ortho imagery and created a cropped version covering just the course. I essentially used the techniques described in my post on LIDAR imagery, except that the ortho imagery came from the USGS National Map Viewer. I created both a geotiff that has georeferencing information, and an opaque .png which is projected identically, but has no embedded information. On that last image, I did a little gimp hackery to edit out cars which would be in the path of the actual course.
{kind=link}
3D Models
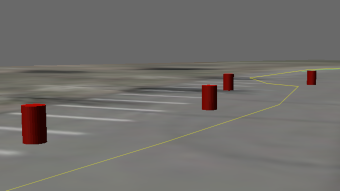
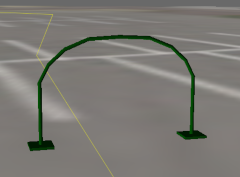
I also made a set of somewhat (OK very) crude blender models of each of the different obstacles present on the course to approximately correct dimensions. This includes the barrels, the hoop, and the ramp.
 avc2013-barrel.blend avc2013-barrel.blend |
 avc2013-hoop.blend avc2013-hoop.blend |
 avc2013-ramp.blend avc2013-ramp.blend |
|---|
Drivethrough Video
Finally, just for fun, I recorded a screencast of one of the first drivethroughs of Savage Solder on the simulated Sparkfun AVC Course. This was with just the bare minimum of changes from what we’ll use at RoboMagellan in Robogames in two weeks, so for now it was navigating purely by GPS and IMU. It drives through the hoop about one time in three, which is enough to catch a good video! As in my previous simulation videos, the yellow line is where the absolute surveyed GPS path is. The green line is where the car thinks the GPS path is at any moment, which will differ due to GPS error and heading error.