Autonomous Racing Rotorcraft: Camera Signal Integrity
IGEP COM Pro to TechToys OV9650 Adapter
Last time working with the racing helicopter’s camera system, I managed to capture a poor quality image from the camera. My next step was attempting to diagnose the problems with the image quality. However, before I could do so, I ran into another problem with signal integrity in my breadboard setup.
The TI DM3730’s ISP with the 3.6 kernel is relatively sensitive to the quality of the pixel clock and vertical sync. If a single frame has the wrong number of pixels detected, the driver does not seem to be able to recover. This was a big problem for me, as the breadboard setup I have runs many of the 12MHz signal lines over 24 gauge wire springing around a breadboard. What I found was that I was only intermittently able to get the ISP to capture data, and eventually it got to a point where I could not get a single frame to capture despite all the wiggling I could attempt.
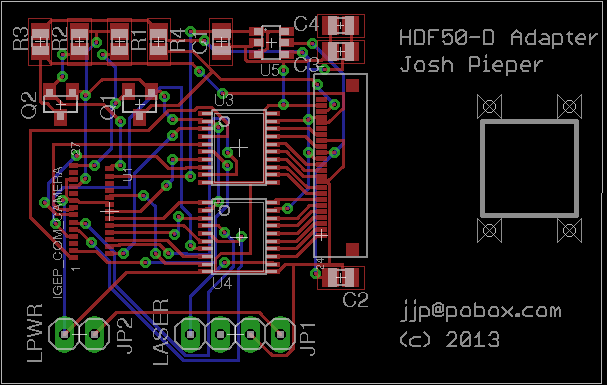
Rather than spending a large amount of time trying to tie up my breadboard wires just so, I instead just printed up a simple adapter board which contains all the level translation and keeps the signal paths short. This time, I tried printing it at oshpark.com, a competitor to batchpcb. The OV9650’s FFC connector has pads with a 7.8mil spacing, and batchpcb only supports 8.1mil, while oshpark has 6mil design rules. They also claim to ship faster, and are slightly cheaper.
The results were pretty good. From start to finish, it took 14 days to arrive, and the 3 boards appeared to have no major defects. My art had one minor error which required rework. The output enable pin on the level converters were tied to the wrong polarity, thus the lifted pins and blue wiring. Despite that, it appears to be working as intended.
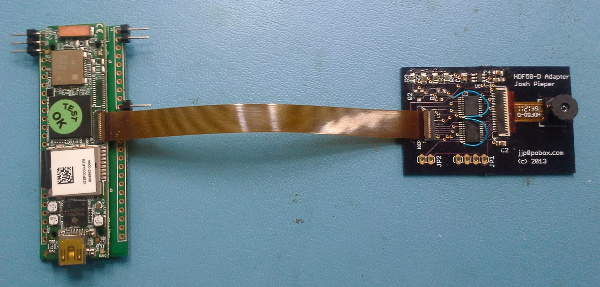
Final OV9650 adapter attached to IGEP COM Pro